Come creare un allarme intruso con Raspberry Pi Pico
I microcontrollori sono spesso utilizzati in prodotti di sicurezza commerciale come gli allarmi antifurto. Quest’ultimo può essere piuttosto costoso, tuttavia. Allora perché non creare un allarme fatto in casa usando un microcontrollore Raspberry Pi Pico da $ 4?
Questo utilizza un sensore PIR (infrarosso passivo), utilizzato da molti sistemi di allarme commerciali, per rilevare la presenza di un intruso. È l’ideale per catturare chiunque si intrufoli nella tua stanza o curiosando intorno alla tua scrivania o per proteggere la tua scorta di biscotti. Utilizzando MicroPython, puoi programmare il tuo allarme in modo che reagisca con un avviso acustico e una luce lampeggiante.
1. Costruire l’allarme
Per costruire l’allarme, avrai bisogno di una selezione di componenti elettronici standard.
Di cosa avrai bisogno:
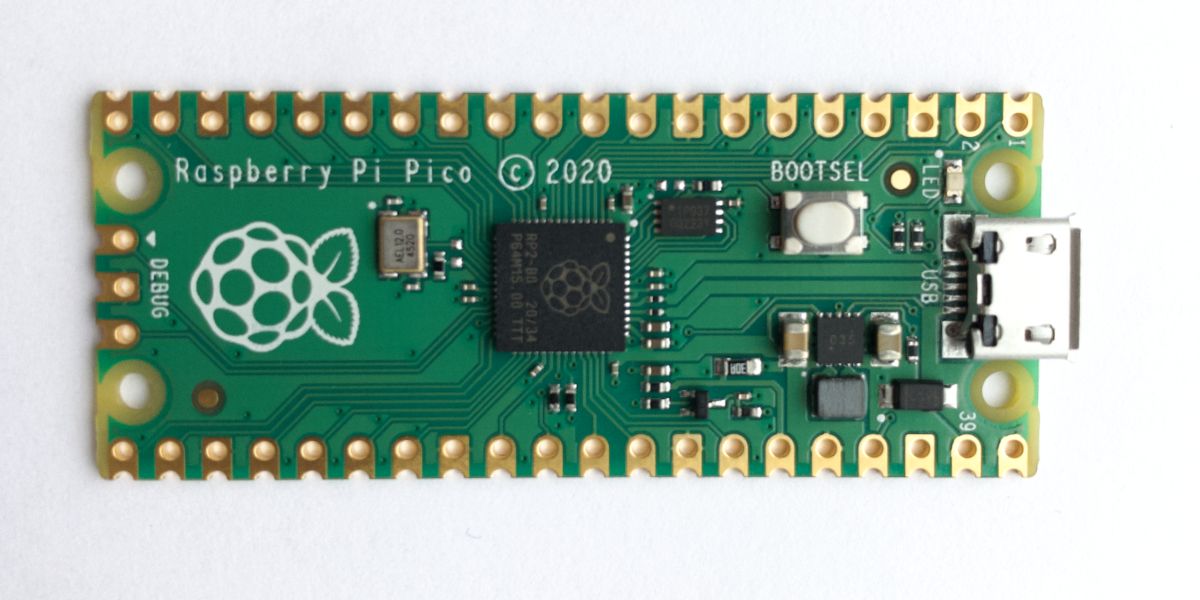
- Raspberry Pi Pico con connettori maschio saldati
- Breadboard
- LED (qualsiasi colore)
- Resistenza da 330 ohm
- Buzzer piezoelettrico attivo
- Sensore PIR HC-SR501
- 4x cavi jumper maschio-maschio (M2M)
- 3 cavi per ponticelli maschio-femmina (M2F)
Nota: se non hai voglia di saldare le intestazioni dei pin maschi al tuo Raspberry Pi Pico, è possibile acquistare un Pico con le intestazioni già collegate.
Prima di collegare tutto, dai un’occhiata alla parte inferiore del Pico per vedere le etichette dei pin.

Nella parte superiore del Pico, puoi anche vedere come funziona la numerazione fisica dei pin, da 1 a 40, in senso antiorario dalla sinistra della porta micro-USB.
Sulla breadboard, inserisci le intestazioni dei pin maschi di Pico nei fori su un’estremità. Spingerlo con decisione verso il basso per garantire buoni collegamenti: dovrebbe adattarsi perfettamente. Quindi utilizzare cavi jumper femmina-maschio per collegare il sensore PIR ad esso: il pin VCC deve essere cablato al VBUS 5V di Pico, l’uscita digitale a GP28 e GND a un pin GND (ad esempio, pin 3), come mostrato nella schema elettrico di seguito.
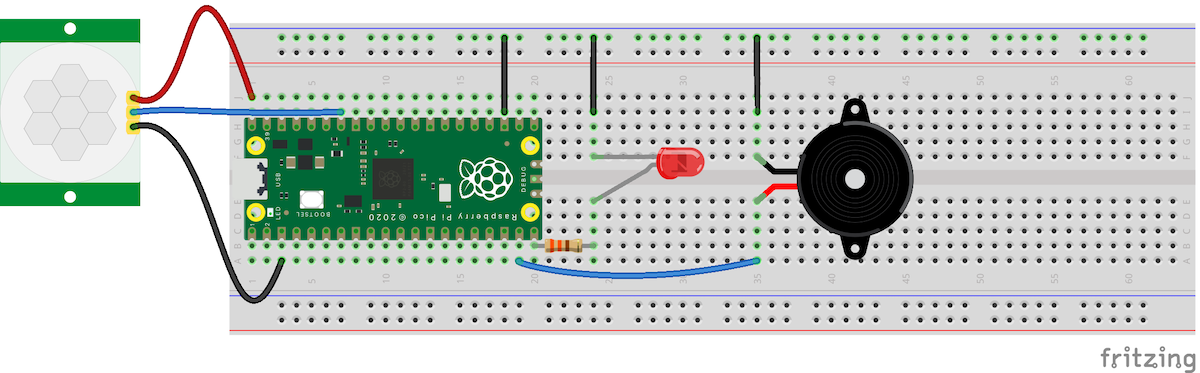
Collegare uno dei binari di terra della breadboard (contrassegnato da una linea blu) a un altro pin GND su Pico (es. Pin fisico 23, come qui). Per una luce lampeggiante, inserire un LED nella breadboard, le sue gambe su entrambi i lati della divisione centrale.
La gamba più corta (catodo) dovrebbe quindi essere collegata alla stessa guida di terra. La gamba più lunga (anodo) del LED deve essere collegata al pin GP15 tramite un resistore per limitare la quantità di corrente elettrica che lo attraversa, che potrebbe altrimenti danneggiare il LED o il Pico.
Infine, aggiungi un cicalino per emettere un segnale acustico quando l’allarme si attiva. Posiziona le gambe su entrambi i lati della divisione centrale della breadboard e collega la gamba più corta o il filo nero al binario di terra e la gamba più lunga (a volte contrassegnata sopra il cicalino con ‘+’) o il filo rosso a GP14.
2. Programmazione dell’allarme
Dovrai installare MicroPython su Pico. Questo processo prevede quattro semplici passaggi:
- Scarica MicroPython per Raspberry Pi Pico dal sito Web Raspberry Pi
- Collega il Pico al tuo computer tramite la sua presa micro-USB tenendo premuto il pulsante BOOTSEL
- Attendi che Pico appaia come un’unità esterna
- Trascina e rilascia il file .uf2 MicroPython per copiarlo su Pi Pico; si riavvierà automaticamente
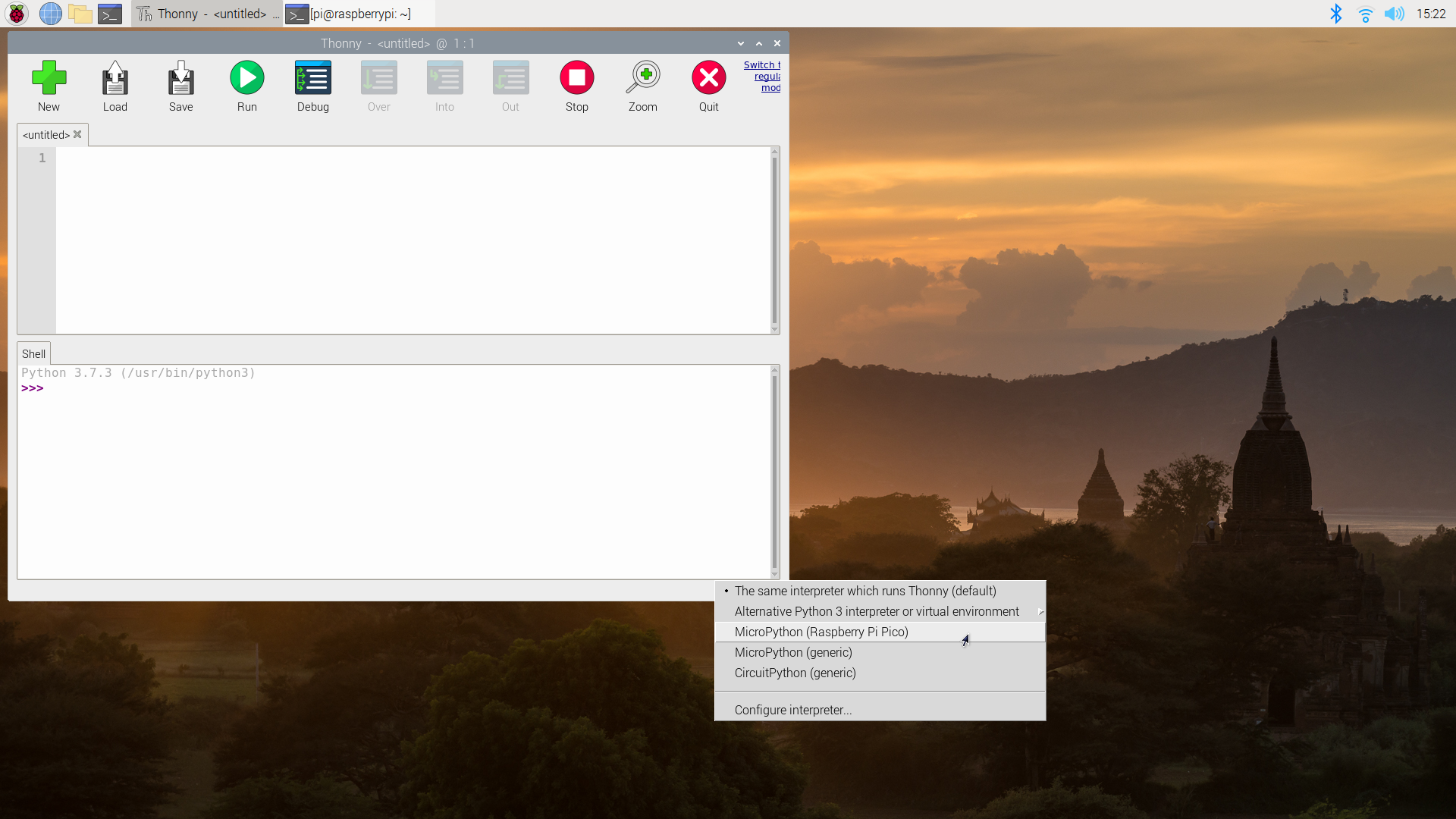
Mentre numerosi IDE di programmazione (ambienti di sviluppo integrati) sono disponibili per MicroPython, qui useremo Thonny. È già preinstallato nel sistema operativo Raspberry Pi (se stai utilizzando un computer Raspberry Pi collegato al Pico), oppure può essere scaricato per qualsiasi sistema informatico dal sito Web ufficiale facendo clic sul collegamento nell’angolo in alto a destra.
Scarica: Thonny (gratuito)
Con il tuo Pico connesso al computer, apri Thonny. Nell’angolo in basso a destra della finestra di Thonny, vedrai la versione di Python che stai attualmente utilizzando. Fare clic su di esso e selezionare MicroPython (Raspberry Pi Pico) .
Ora sei pronto per programmare il tuo allarme intruso sul Pico. Aggiungi le seguenti righe di codice al riquadro principale di Thonny.
import machine
import utime
pir = machine.Pin(28, machine.Pin.IN, machine.Pin.PULL_DOWN)
led = machine.Pin(15, machine.Pin.OUT)
buzzer = machine.Pin(14, machine.Pin.OUT)
def pir_handler(pin):
utime.sleep_ms(100)
if pin.value():
print("Motion detected. Intruder alert!")
for i in range(50):
led.toggle()
buzzer.toggle()
utime.sleep_ms(100)
pir.irq(trigger=machine.Pin.IRQ_RISING, handler=pir_handler)Qui, importa la macchina e le librerie utime in alto. Quindi, configura gli oggetti per PIR, LED e cicalino, collegati rispettivamente ai pin GP28, GP15 e GP14.
Notare che il PIR è impostato come ingresso con machine.Pin.IN , con un parametro machine.Pin.PULL-DOWN per impostare la resistenza del suo pin Pico in modalità pull-down; questo significa che verrà letto come zero fino a quando non viene inviata una corrente elettrica dal PIR che viene attivato.
Nella parte inferiore del codice, è impostato un IRQ (richiesta di interruzione) per attivare la funzione pir_handler non appena viene rilevato un segnale sul pin di ingresso (GP28) dal sensore PIR.
Nella funzione stessa, per evitare innescamenti ripetuti in breve tempo, aggiungere un ritardo di 100 ms prima di ricontrollare il valore del pin e, se diverso da zero, attivare l’allarme. Quindi accende e spegne il LED e il cicalino, per far lampeggiare la luce ed emettere un segnale acustico.
Salva il programma sul tuo Pico con un nome pertinente, come alarm.py . Esegui il programma e, quando agiti la mano sul sensore PIR, il cicalino dovrebbe emettere un segnale acustico e il LED lampeggerà rapidamente.
3. Regolazione della sensibilità del sensore
Se l’allarme suona troppo facilmente o non si attiva affatto, potrebbe essere necessario regolare la sensibilità del sensore PIR. L’HC-SR501 ha due viti di plastica, solitamente etichettate come Sx e Tx, collegate a due piccoli potenziometri per regolare le sue impostazioni.
Utilizzando un piccolo cacciavite, è possibile ruotare la vite Sx in senso antiorario per aumentarne la sensibilità (o viceversa). La rotazione della vite Tx altera il tempo di invio del segnale attivato dopo il rilevamento di intrusi: abbiamo ritenuto che fosse meglio ruotarlo completamente in senso antiorario, per il più breve ritardo di 1 secondo.
Per impostazione predefinita, il PIR rileverà qualsiasi movimento a 360 ° attorno ad esso. Se vuoi limitare il suo raggio di rilevamento, prova a posizionarlo sul fondo del tubo interno di cartone da un rotolo di carta igienica e inclinalo nella direzione che desideri coprire.
Crea il tuo allarme antintrusione mobile
Una volta che l’allarme anti-intrusione funziona in modo soddisfacente, potresti voler allontanarlo dal tuo computer. Salvando il programma come main.py , puoi quindi scollegarlo dal computer e collegare un power bank mobile standard alla sua porta micro-USB.
Il Pico eseguirà quindi automaticamente il programma main.py non appena viene acceso. Congratulazioni: ora hai un allarme antintrusione mobile da posizionare ovunque tu voglia.